Comment fonctionne un scanner ?
Principe général
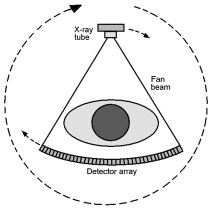
Un CT Scan (Computed Tomography Scanner) est un appareillage d’imagerie médicale utilisant la tomographie. Il permet de générer une image en trois dimensions ŕ partir d’une série d’images en deux dimensions prises autour d’un seul axe de rotation.

Voici une vidéo expliquant le principe de fonctionnement de notre scanner :
Les différentes générations de scanner
Plusieurs types d'assemblages mécaniques, aussi appelés générations de scanner, existent. Pour notre projet, nous avons choisi la troisičme génération car celle-ci possčde un excellent rapport facilité de construction sur temps d'acquisition des données. Celle-ci se base sur un mouvement de rotation des capteurs lumineux autour de l’objet. Les capteurs sont tous alignés dans le plan de la coupe (nom donné ŕ une tranche 2D de l'objet 3D) et sont déplacés verticalement petit ŕ petit pour prendre des mesures sur toute la hauteur de l'objet ananlysé.
Voici une vidéo expliquant bričvement le principe des scanners de troisičme génération :
Notre prototype doit ętre capable d'effectuer deux mouvements pour prendre des mesures: un mouvement de rotation de la figurine, et un mouvement d'élévation du dispositif de mesure.
Le choix du moteur
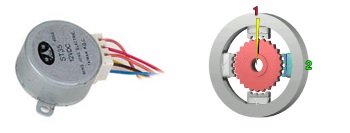
Concernant le mouvement de rotation, nous avons décidé que l’objet ŕ scanné sera dans une position verticale. Nous avons également choisi de faire tourner la plaque sur laquelle tient la figurine au moyen d’un moteur pas ŕ pas plutôt que de faire tourner le couple émetteur-récepteur. Ceci permet d’éviter un emmęlement des fils qui lient les différents composants électroniques.
Nous avons préféré d’utiliser un moteur pas ŕ pas car ce type de moteur est formé de plusieurs bobines alimentées alternativement. L’aimant se trouvant au centre des bobines va, en fonction de l’alimentation de celles-ci se déplacer par « bonds successifs ». Ces « bonds » étant situés ŕ intervalles réguliers, on peut obtenir une rotation trčs précise grâce ŕ ce type de moteur, et cela est justement nécessaire dans le cadre de notre projet.
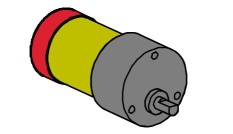
Pour ce qui est du mouvement de translation, un moteur ŕ courant continu a par contre été sélectionné, car il est plus simple et plus puissant (=possčde un couple plus élevé) que le moteur pas ŕ pas, ce qui s'avčre nécessaire pour compenser le poids des pičces ŕ déplacer, principalement des photorécepteurs.
Une fois le systčme constuit, le résultat obtenu fut le suivant:
Lire les données d'un scanner
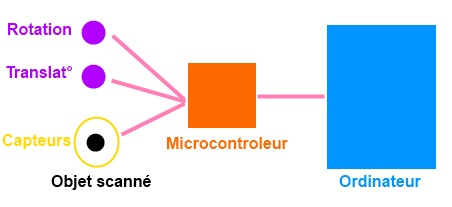
Le systčme de capteurs est, comme vous avez pu le voir, basé sur un plus ou moins grand nombre de photorécepteurs (photodiodes, phototransistors). Cet ensemble de photorécepteurs est relié ŕ un circuit communiquant avec un microcontrôleur (c'est un petit élément électronique qui permet de lire et d'envoyer des signaux électriques ŕ l'ordinateur et surtout aux composants tels que les moteurs et les capteurs lumineux). Celui-ci emmagasinera les données et les transmettra ŕ l’ordinateur.
Ces données vont alors ętre traduite grâce ŕ un programme informatique dans le but de reconstituer l’objet sur l’ordinateur.
Vous pouvez retrouver ici un essai de notre programme de modélisation (ici, des données ont été manuellements introduites pour le test).